学部4年 都筑君が情報処理学会第89回UBI研究会にてUBIヤングリサーチャー賞を受賞しました.
「UBIヤングリサーチャー賞」は大学院修士課程1年までの学生枠で投稿した論文に対してプレゼンと論文の質を総合的に判断して表彰される賞です.
スマートフォン内のセンサ情報のみと機械学習によるWBGT推定手法
都筑 零・田中 元(慶應義塾大学 総合政策学部)・柘植 晃(柘植ITデザイン事務所)・丸井 朱里(慶應義塾大学 大学院政策・メディア研究科)・中澤 仁・大越 匡(慶應義塾大学 環境情報学部)
学部4年 都筑君が情報処理学会第89回UBI研究会にてUBIヤングリサーチャー賞を受賞しました.
「UBIヤングリサーチャー賞」は大学院修士課程1年までの学生枠で投稿した論文に対してプレゼンと論文の質を総合的に判断して表彰される賞です.
スマートフォン内のセンサ情報のみと機械学習によるWBGT推定手法
都筑 零・田中 元(慶應義塾大学 総合政策学部)・柘植 晃(柘植ITデザイン事務所)・丸井 朱里(慶應義塾大学 大学院政策・メディア研究科)・中澤 仁・大越 匡(慶應義塾大学 環境情報学部)
Keio/CMU連携における大越のPhD co-advisorであり、コンテキスト・アウェア・コンピューティングの”オリジン”であり、大規模データに基づく人間の行動/状態認識技術の大家であるUWのAnind Dey教授を、特別招聘教授(国際)としてSFCにお招き出来ました。6/18は今週のメインイベントということで、研究会の授業の時間を使い、データとAIによる人間行動理解の鍵としての「ルーティン行動」認識について、特別講演を頂きました。学部1年生〜博士課程にいたるまで、学生がどんどんと積極的に質問したり、議論をふっかけたり、自分を売り込んでいく姿を見れるのは、SFC発の次世代の世界人材の息吹を見ているようで頼もしい限りです。
JeongGil Ko先生、Chenren Xu先生とそしてDey先生と、慶應義塾グローバル教員プログラムにおいて、韓国、中国、米国からどんどんとSFCに来訪いただき、研究室の皆の国際感覚の「あたりまえ」のレベルがだんだんと上がっていくのを感じます。
それぞれと先生方と国際共著論文を投稿したり、インターン等国際交流の計画がそれぞれに進行しています。本当にこれからが楽しみであると同時に、私のお願いにお答え頂き、はるばるSFCまでいらっしゃってくださる先生方には、本当に感謝の念しかありません。
大越匡
It is our tremendous pleasure to welcome Professor Anind Dey of the University of Washington to SFC as a Guest Professor (International). Prof. Dey is Tadashi Okoshi’ PhD co-advisor in the Keio/CMU collaboration, one of the originators of context-aware computing, and a leading authority on technologies for recognizing human behavior and states from large-scale data. As the main event of this week, Anind gave a special lecture during our research group time on the recognition of “routine behavior” as a key to understanding human behavior through data and AI.
Watching our students from freshmen all the way to PhD candidates actively raising questions and discussions was quite an impressive moment, feeling like “witnessing” the breath of the next generation globally-minded talent emerging from SFC.
With Prof. JeongGil Ko, Prof. Chenren Xu, and Prof. Dey visiting SFC one after another from Korea, China, and US through Keio’s Global Faculty Program, we can feel the baseline level of international awareness among our students in the lab steadily rising, becoming something they simply take for granted.
More plans are underway with each of these professors for international co-authored papers, possible internships, and other forms of academic exchange.
we am genuinely excited about what lies ahead, and at the same time, we feel deep gratitude toward these professors who kindly accepted my request and traveled all the way to SFC.
Tadashi Okoshi


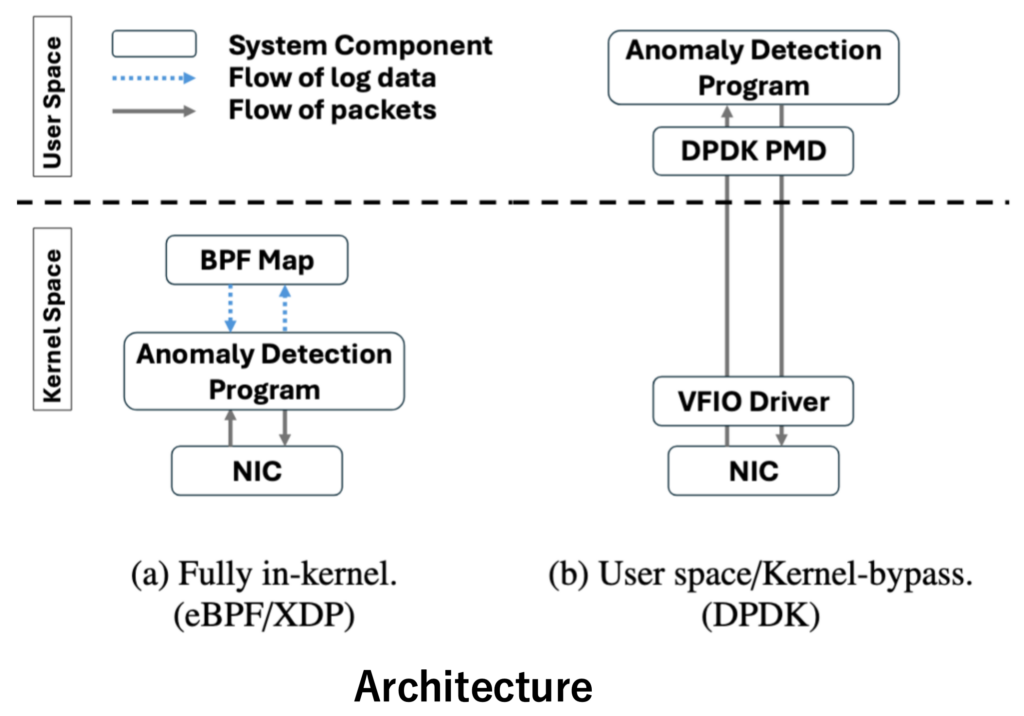
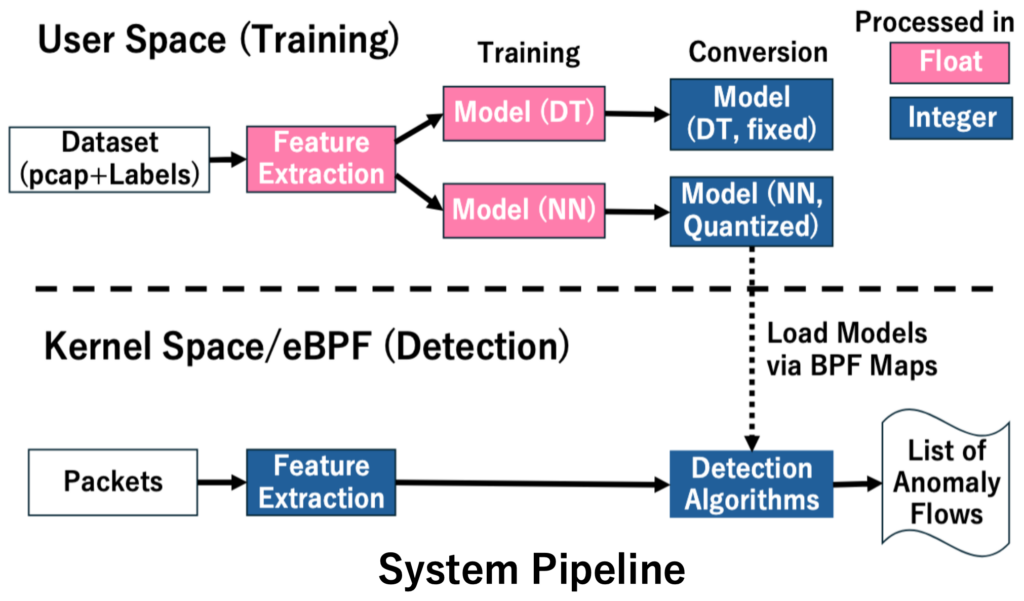
卒業生 大崎君の研究「Overcoming eBPF Constraints: Towards Practical ML/NN-based Anomaly Detection」が情報処理学会論文誌に採択されました.学部4年次の成果です.
概要:
Machine learning (ML) and neural networks (NN) in extended Berkeley Packet Filter (eBPF) and eXpress Data Path (XDP) are being explored for network anomaly detection to balance accuracy and throughput. However, eBPF’s constraints, such as the instruction count limitation and the absence of floating-point support, make the implementation of such algorithms challenging. While previous works use workarounds, they lack cost analysis of the workarounds and performance comparisons with the user space approach. This paper investigates the practicality of overcoming these constraints in the context of ML/NN-based anomaly detection through evaluations of the cost and the impact of workarounds. We show that while instruction count is not a major concern, arithmetic errors in static fixed-point calculations negatively affect feature extraction and detection accuracy. However, we also show that dynamic fixed-point can match the detection accuracy in kernel space with that in user space. Furthermore, we demonstrate that the performance gap between eBPF/XDP and faster kernel-bypass technologies narrows to just 7% in ML/NN-based anomaly detection contexts. We conclude that ML/NN-based anomaly detection in eBPF/XDP is not only feasible but beneficial for real-world deployments compared to alternatives.
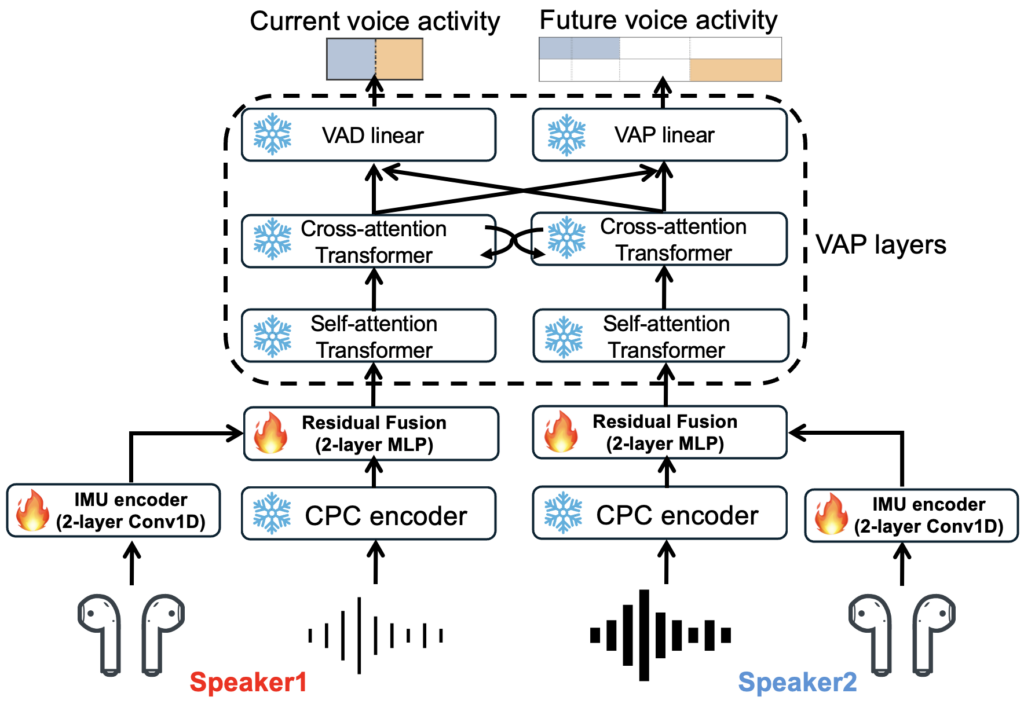
博士課程3年 濱中君の研究「Sensor-Augmented Voice Activity Projection for Enhancing Turn-Taking Prediction」が国際会議 SIGDIAL2026にacceptされました.本研究はNTTコミュニケーション科学基礎研究所との共同研究です.
Abstract:
Voice Activity Projection (VAP) has been actively studied to enable natural turn-taking in spoken dialogue systems, relying primarily on acoustic features. Visual cues such as head movements are also known to contribute to turn-taking prediction; however, camera-based approaches are affected by placement and lighting conditions and are not always reliably available to dialogue systems. As a camera-independent approach for directly capturing head motion, earable devices offer a promising solution.
In this study, we propose Sensor-Augmented VAP, a framework that integrates in-ear inertial measurement unit (IMU) signals with a pre-trained VAP model via a lightweight residual fusion module. To validate our proposed method, we collected a dataset pairing conversational audio with in-ear IMU data, comprising 12 dyadic Japanese dialogues recorded using microphones and earbuds. Experiments in speaker-independent and speaker-dependent settings demonstrate that IMU fusion consistently improves weighted F1 score for shift detection and reduces VAP loss over the audio-only baseline. These results confirm that head-motion cues are effective for enhancing turn-taking prediction.
博士課程3年 濱中君の論文が情報処理学会論文誌ジャーナル/JIP特選論文に選定され、表彰されました。
情報処理学会論文誌ジャーナル/JIP特選論文は、情報処理学会論文誌ジャーナル及びJIPに掲載された論文のうち、より多くの研究者が参照すべき論文に対して与えられる名称です。
詳細は情報処理学会のウェブサイトをご参照ください。
https://www.ipsj.or.jp/award/ssp_award.html
【受賞論文】
濱中智己, 坂本一憲, 佐々木由樹, 水野慎一郎, 川崎康紀, 佐々木航, 中澤仁 and 大越匡, “ライフログサービスにおける行動変容に向けた適応的プッシュ通知型情報提示手法,” 情報処理学会論文誌, vol. 67, no. 3, pp. 571-587, 2026.
博士課程2年 王君の論文が台湾・新竹の國立陽明交通大学で開催されたCAADRIA2026に採択され,発表しました.
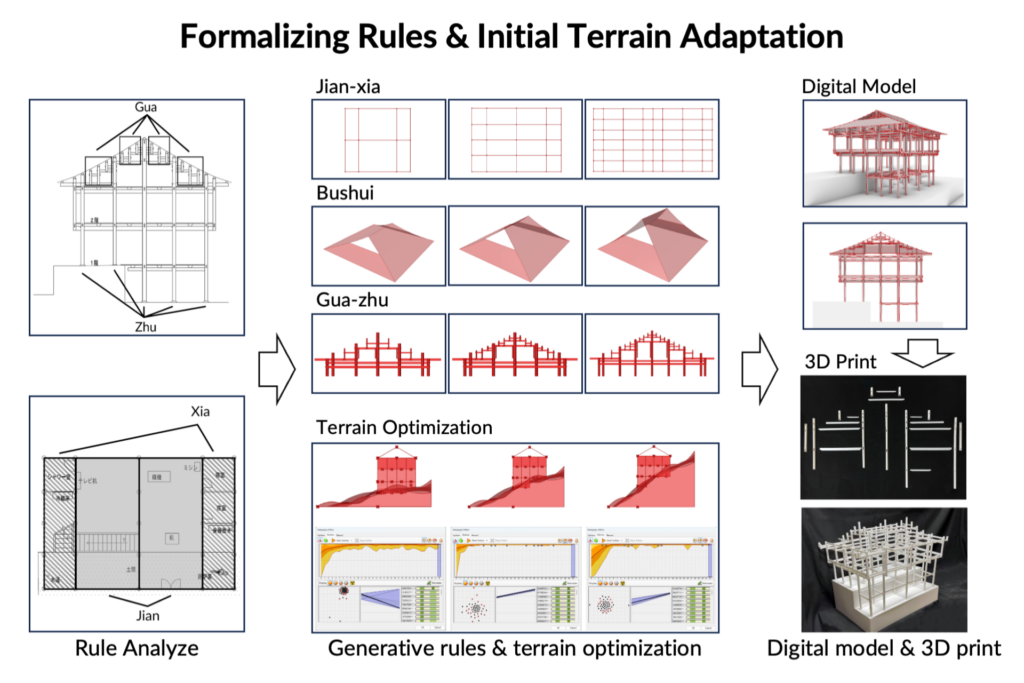
Abstract: Timber dwellings of the Miao people in Southwest China embody orally transmitted construction intelligence developed by Zhangmoshi master carpenters. While photogrammetry and laser scanning can capture geometry, they reveal little of the proportional and procedural logic guiding construction. This study proposes a rule-based parametric framework that encodes key Miao principles—Jian-xia (bay layout), Gua-zhu (bracket–column relation), and Bushui (roof slope)—using Grasshopper and Python. The system integrates terrain optimisation via Galapagos and is structured for interoperability with Heritage BIM environments. Validation on a representative Miao dwelling demonstrates geometric fidelity and adaptability. Through modular rule extraction and parametric recombination, the framework enables systematic variation while preserving vernacular coherence. The resulting system supports reconstruction, analytical comparison, and design exploration across different site conditions and parameter settings. By translating oral craft knowledge into computational rules, the research advances digital heritage and contributes to broader discussions of cultural algorithmicity and computational heritage in vernacular architecture. The approach further suggests a transferable methodology for encoding other tectonic timber traditions facing challenges of intangible knowledge loss.
Wang, Liuhan, Jin Nakazawa, and Hiroto Kobayashi. “Encoding Vernacular Intelligence: Parametric Rules for the Preservation and Fabrication of Miao Timber Architecture.” (2026).
本研究室から5本の論文を情報処理学会第89回UBI研究会で発表しました.論文題目は以下の通りです.
都筑君の研究「スマートフォン内のセンサ情報のみと機械学習によるWBGT推定手法」は「UBIヤングリサーチャー賞」を受賞しました.



修士課程1年 羅君の論文がイタリア・ピサで開催されたIEEE PerCom 2026 WIP sessionに採択され,発表しました.
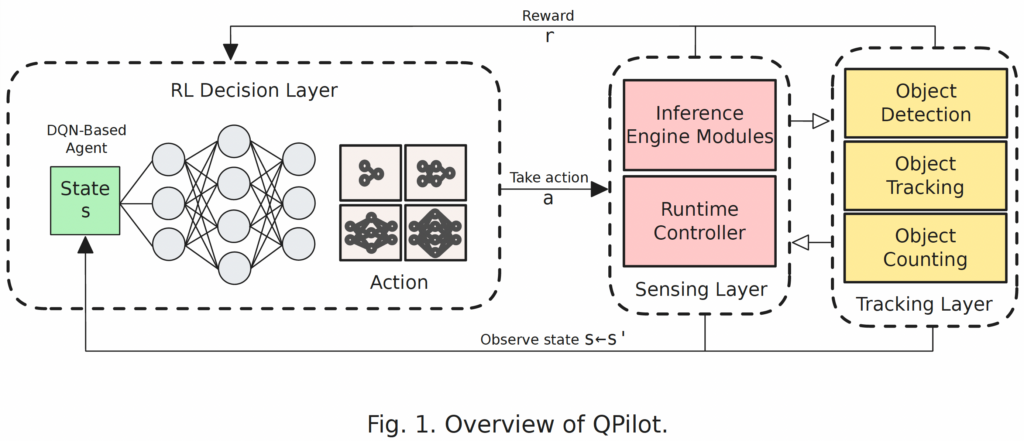
Abstract: Edge computing plays a key role in smart-city deployments. Deploying AI models on edge devices reduces latency and privacy concerns. This work proposes QPilot, a reinforcement-learning-based adaptive model-switching method that dynamically selects detection models of different sizes for multi-object tracking (MOT) inference to balance efficiency and accuracy according to device compute capacity and scene complexity. In object-sparse scenarios, it improves tracking accuracy with only a small additional computational cost and achieves an optimal efficiency–accuracy trade-off in MOT. We validated the method on multiple hardware platforms, showing strong cross-device adaptability as well as feasibility and promise for edge environments.
Chieh Lo, Wenhao Huang, Akira Tsuge, Yin Chen, Tadashi Okoshi, Jin Nakazawa. “QPilot: Reinforcement Learning-Based Adaptive Scheduling for Object-Sparse MOT”. IEEE PerCom 2026, Pisa, Italy
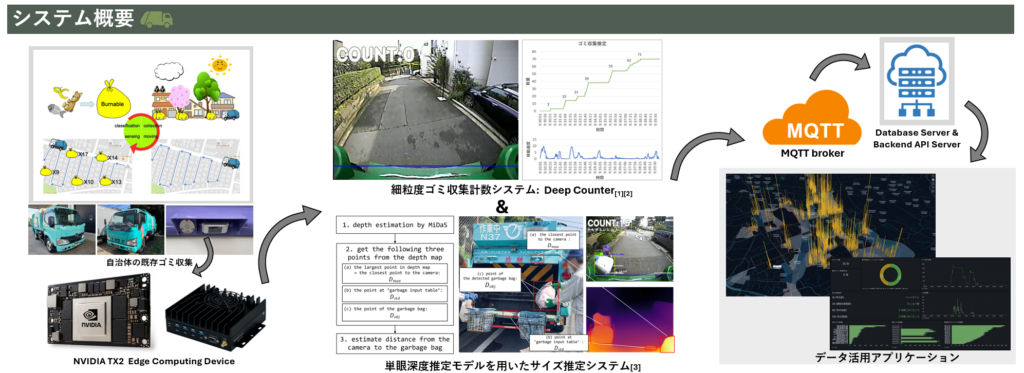
修士課程2年 伊藤君が東京科学大学で開催された令和7年度 廃棄物資源循環学会 関東支部主催講演会 研究発表会で優秀ポスター賞を受賞しました.
発表タイトル:「細粒度ゴミ排出量データ基盤を用いた鎌倉市戸別収集化の社会影響分析」
伊藤 隆, 陳 寅, 中澤 仁概要:近年、自治体のごみ処理を取り巻く環境は厳しさを増しており、最終処分場の確保の困難化やごみ収集事業者の人材不足などが課題となっている。 例えば、神奈川県鎌倉市では2025年3月焼却炉の稼働停止となった。また、自治体には効率的な行政運営や市民サービス向上が求められる一方で、施策の効果を説明する責任も高まっている。 鎌倉市では市民サービスの観点から2025年4月より一部地域で戸別収集を開始した。戸別収集は近年、他の自治体でも実施されている事例はあるが、戸別収集がごみ排出量や収集業務に与える影響を定量的に評価した研究は少ない。 さらに、自治体が保有するデータは収集車単位の回収重量が中心であり、地域や地点ごとの細粒度な排出量データは不足している。 本研究では、複数の深層学習モデル、エッジAIデバイス、モバイル通信網を組み合わせた広域センシングにより、細粒度のごみ排出量データ基盤を構築し、データ基盤で収集したデータを活用し、鎌倉市における戸別収集施策の影響について定量的・定性的な分析を行うことを目的とする。

2026年1月7日(水)から9日(金)にかけて,韓国・延世大学校のJeongGil Ko先生が当研究室を訪問されました.
Ko先生は義塾の特別招聘教授(国際)を兼任されています.