修士課程1年 羅君の論文がイタリア・ピサで開催されたIEEE PerCom 2026 WIP sessionに採択され,発表しました.
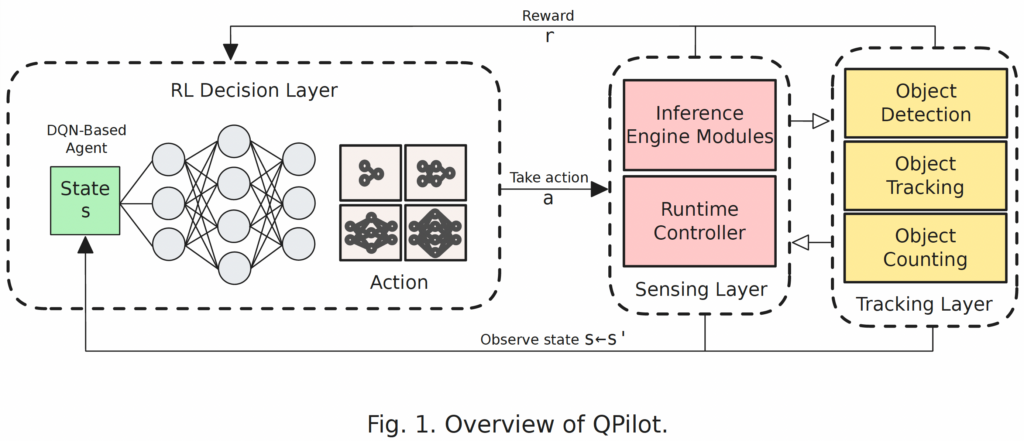
Abstract: Edge computing plays a key role in smart-city deployments. Deploying AI models on edge devices reduces latency and privacy concerns. This work proposes QPilot, a reinforcement-learning-based adaptive model-switching method that dynamically selects detection models of different sizes for multi-object tracking (MOT) inference to balance efficiency and accuracy according to device compute capacity and scene complexity. In object-sparse scenarios, it improves tracking accuracy with only a small additional computational cost and achieves an optimal efficiency–accuracy trade-off in MOT. We validated the method on multiple hardware platforms, showing strong cross-device adaptability as well as feasibility and promise for edge environments.
Chieh Lo, Wenhao Huang, Akira Tsuge, Yin Chen, Tadashi Okoshi, Jin Nakazawa. “QPilot: Reinforcement Learning-Based Adaptive Scheduling for Object-Sparse MOT”. IEEE PerCom 2026, Pisa, Italy