修士課程2年 伊藤君の研究「Object Size Classification in Garbage Disposal Sensing System Using Monocular Depth Estimation」が国際会議 AIoTSys 2025にacceptされました.
Abstract:
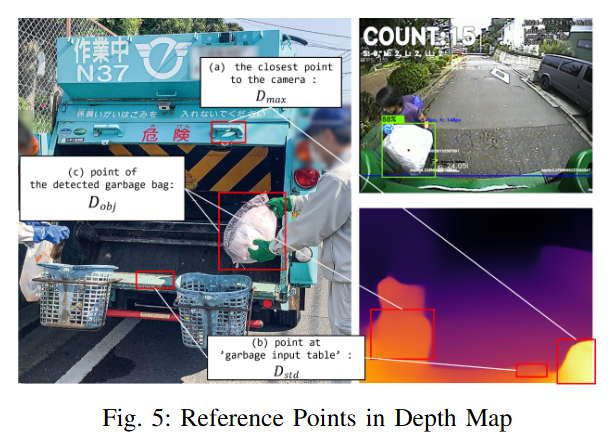
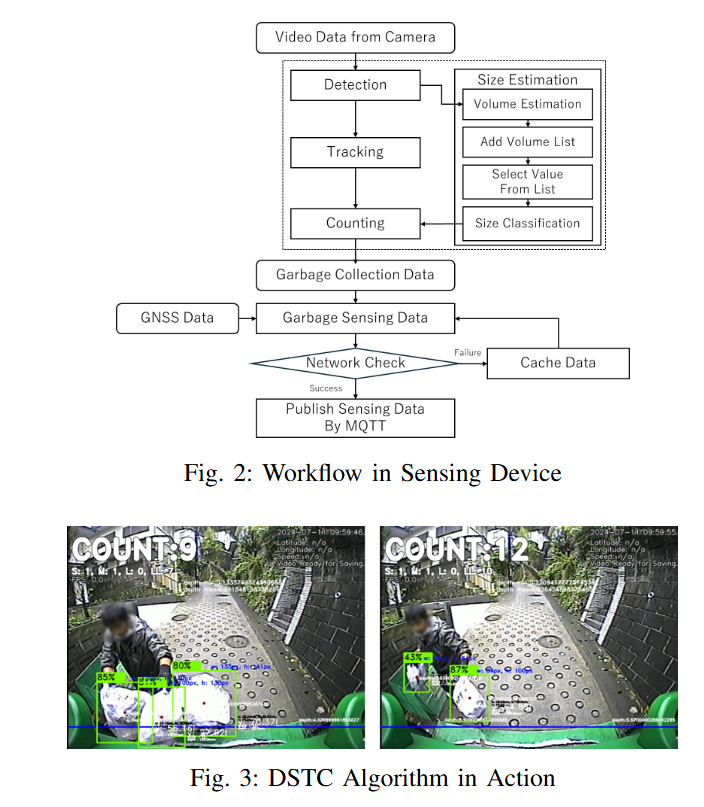
Deep learning-based object detection is widely used in urban sensing, enabling tasks such as pedestrian, pothole, and waste detection. Automotive sensing with dashcams facili- tates large-scale, real-time detection across urban environments. However, existing studies primarily focus on detection without estimating object size, which is crucial for event classification. Conventional size estimation methods rely on RGB-D cameras, multiple cameras, or LIDAR, making them unsuitable for large- scale automotive sensing with single RGB dashcams. Monocular depth estimation provides relative depth but does not yield abso- lute size measurements. To address this limitation, we propose a novel approach that combines monocular depth estimation with a reference object of known size. By comparing the detected object’s pixel dimensions with those of the reference object, its physical size can be estimated. To validate our approach, we developed an automotive sensing platform that detects and quantifies household garbage bags using footage from the rear- view camera of garbage trucks. The truck body serves as the reference object, ensuring reliable size estimation. Experiments conducted with real-world data collected using an NVIDIA Jetson TX2 demonstrate the effectiveness of our method. The proposed approach achieves size estimation accuracy with mean squared errors (MSEs) of 20.02 for width and 18.68 for height while maintaining an end-to-end processing rate of 19.21 frames per second (FPS) for detection, tracking, and size estimation.